
研究概要 |
| 災害現場の復旧作業などでは,危険な作業を回避するため無人化施工が注目されています.建設機械による無人化施工を実現する場合,上述したように機械工学,地盤工学,電子工学を有機的に融合させることが必要不可欠です.そこで,他の研究機関と共同でジオメカトロニクスの高度展開に関する研究を実施しています. 【最近の研究テーマ】 ●非拡散型高含水比泥土回収機械の開発 ●パワーショベルによる斜面掘削時の抵抗力解析 ●割岩工法の自動化技術 ●画像処理を用いたホイールローダの破砕堆積物掘削作業計画の構築 ●ベルコン下部に堆積した落鉱の自動処理機械の開発 ●車体屈曲型車輪式移動車輌の自律走行時の横滑りに関する研究 ●オーバーヘッド型ベッセル搭載LHDの機構に関する研究 【今後の展開研究】 ●環境ジオメカトロニクス ●廃棄物の地産地消 |
非拡散型高含水比泥土回収機械の開発 | ||
 |
|
|
非拡散型高含水比泥土回収のイメージ |
||
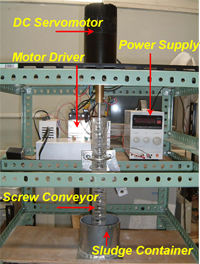
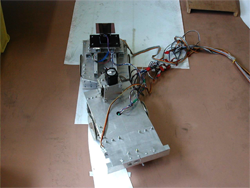
| 生活排水等の影響により河川の富栄養化が進み,全国の河川・湖沼・港湾でヘドロが大量に発生しています.特にダムや水門などの水の流れが停滞しやすい場所にヘドロが堆積することが多く,それによってダムの貯水能力の低下,排水路の閉塞,悪臭による生活環境の悪化,水質悪化等の問題を引き起こしています.また,ヘドロには重金属等の汚染物質が含まれることもあります.ヘドロの簡易的な回収方法としてバケットによる掘削がありますが,この場合は掘削によるヘドロの拡散が激しく,重金属等の汚染物質を含むような場合は,掘削により汚染物質をさらに拡散してしまうことにもなりかねません.近年では環境への影響が重視され,浚渫の際に発生する濁水を抑えるための研究が進められていますが,港湾等の工事規模の大きな場所を対象とする研究が多く,小さな河川あるいは水門等におけるヘドロを対象とした研究は少ないのが現状です.また,ヘドロは一般に含水比が高いため,最終処分場に運搬するには非経済的であり,また現地での土質改良および資源としての有効利用を考えた場合,含水比を可能な限り低く抑えることが望ましいと考えられます. そこで,本研究室では,小型かつ非拡散回収が可能で,さらに脱水機構を有した環境配慮型の非拡散型高含水比泥土回収・脱水装置の開発を目指し,土砂回収に関する基礎データを得ることを目的とした研究を進めています.図(左)は本研究で開発を目指す機械を用いた現場でのヘドロ回収のイメージであり,また図(右)はスクリュー式の回収機構を設置した実験装置を示しています.実験の結果,本システムは従来のバケット方式より非拡散で連続的に泥土を回収できることを確認しています. ページの先頭に戻る 研究内容に戻る |
||
パワーショベルによる斜面掘削時の抵抗力解析 | |
シミュレーション結果 | 掘削機械により土砂・鉱石等の自動掘削を行う場合,作業中の状況判断は,作業の安全性を確保する上で非常に重要な要素であり,これを的確に行うためには,力覚機能の有効利用が必要不可欠です.つまり機械は,「作業が順調に進んでいるかどうか」,「バケットには土砂・鉱石が十分入っているか」,「バケットが大塊等に衝突し,危険な状態にないか」などを自動的に判断する必要があり,このためには作業が順調に進んでいる時の理論的掘削抵抗力を予め把握しておき,さらに機械に力覚センサを搭載して掘削作業時にバケットに作用する抵抗力を常に計測し,両者を比較することにより作業状況を判断することが必要です. そこで,本研究室では代表的な掘削・積み込み機械であるホイールローダとパワーショベルを取り上げ,掘削作業時にバケットに作用する抵抗力に関する物理モデルを導出し,さらに小型模型を用いて実際に掘削作業時における抵抗力を測定し,モデルによる計算値と実験値との比較検討を行い,モデルの妥当性を検証しています. ページの先頭に戻る 研究内容に戻る |
割岩工法の自動化技術 | ||
 |
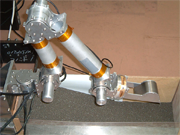
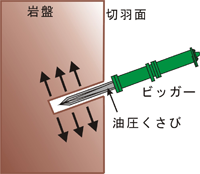
トンネル建設工事における掘削方法には,大きく分けて発破工法と無発破工法の2つがあります.発破工法による掘削は,経費および工期の面で最も有利であると言われています.しかし発破振動が構造物に与える影響や騒音などの面から重要構造物の近くや市街地近郊では発破工法が禁止されることがしばしばあります.無発破工法の1つに割岩工法がありますが,この工法は発破工法に比べ作業効率が大きく劣るという欠点があります.そこで,本研究室では,割岩工法の高効率化を目指し,割岩工法の自動化技術について研究を行っています. 割岩工法の自動化を考えた場合,以下のような作業段階が考えらます. 1.切羽面の手前まで削孔機械を移動させ,切羽面に削孔する. 2.切羽面における孔の3次元座標を認識する. 3.ビッガーを孔の手前まで移動させる. 4.ビッガーを孔に自動挿入させる. 5.油圧くさびを押し出し,1次破砕を行う. 本研究は,割岩工法の自動化に関する基礎的研究として,画像処理により切羽面に削孔された孔の3次元座標を認識し,さらに5自由度マニピュレータを用いて認識した孔の手前までビッガーを移動させ,孔にビッガーを自動的に挿入するためのアルゴリズムについて検討しております. ページの先頭に戻る 研究内容に戻る |
|
画像処理を用いたホイールローダの破砕堆積物掘削作業計画の構築 | ||

搭載したビジョンシステムを用いて,効率的な掘削作業計画を構築し,自律移動します. | 本研究室では,資源開発現場等において,視覚センサを搭載したホイールローダによる発破直後の破砕堆積物のすくい取り作業工程の自動化を想定し,破砕堆積物の形状計測ならびに破砕堆積物の形状に応じたすくい取り作業計画を提案し,小型模型実験により効率性を評価することを目的とした研究を行っています.本研究では,まず複眼視を用いた模擬破砕堆積物の形状計測を試みています.次に形状が認識された模擬破砕堆積物において,いくつかのバケット貫入点,貫入方向および経路を決定し,それぞれのすくい取りを定量的に比較・検討しています.さらに,その結果を基に,ダンピング作業までを含めた破砕堆積物の掘削作業計画を提案し,実際に自動で作業を行うためのアルゴリズムの構築を行っています. ページの先頭に戻る 研究内容に戻る |
|
ベルコン下部に堆積した落鉱の自動処理機械の開発 | ||
 |
|
|
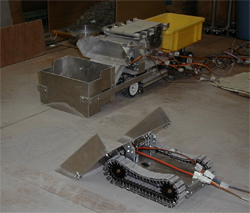
| 現在,鉱山・土木工事現場等で用いられているベルトコンベアは原石の輸送に対して非常に効果的な機械ですが,問題点として,ベルトの戻り時にベルトに付着した鉱石の粉(以下,落鉱と記す)が床に落ちて堆積することが挙げられます.現状では操業中に一旦機械を止めて,作業員が落鉱の山を取り除いていますが,操業中に除去作業を行い,作業員が機械に巻き込まれるという事故も報告されています.またベルトコンベアの戻りベルトと地面との距離は小さいため,落鉱処理作業を行うためには無理な姿勢をとらなければならず,作業員にとって負担が大きいのも事実です.ベルトに反転装置を設ける,あるいはベルトを最新のものに交換するなどの対策で落鉱の量を減らすことは可能ですが,ベルトコンベアの運搬距離は一般に長いので,これらの対策を行うには相当な設備投資が必要になります.そのため,作業員の負担軽減および安全確保,さらに現状の設備を入れ換えることなく,かつ生産効率を低下させることなく,操業中でも落鉱を回収可能な自動機械の開発が望まれているのが現状です. そこで本研究室では,ベルトコンベアが設置されているような狭い空間を自走して,落鉱を回収する自動処理機械の開発を目指し,その要素技術に関する検討を行うとともに試作機の設計・製作および性能評価を行うことにより,その有効性を実証することを目的とした研究を実施しております. ページの先頭に戻る 研究内容に戻る |
||
車体屈曲型車輪式移動車輌の自律走行時の横滑りに関する研究 | ||
 |
|
|
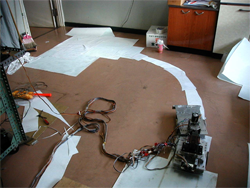
| 雪国の各自治体では,冬季は24時間体制で各種機械を用いた除雪作業を行っており,近年は,安全・快適・環境を重視する傾向から,除雪回数が増加し,除雪費用は,年々増加の傾向にあります.また,資源開発現場あるいは土木建設現場では,作業環境が苛酷なものになることが多く,その結果,労働者に多大の負担がかかり,労働者不足の問題を引き起こしています. これらの背景のもと,雪国においては,除雪費用の削減および作業員の負担軽減を目的として,また,開発・建設現場においては,安全性の確保,作業性の向上を目的として移動車両の自動化・無人化が望まれています. 移動車両の走行機構としては,履帯式と車輪式に大別されますが,特に走行性を重視する場合は,ほとんどの場合,車輪式が採用されます.またこれらの車両に共通していることは,「アーティキュレート方式」と呼ばれる操舵方式を用いた車体屈曲型車輪式移動車両という点です.車体屈曲型車両は旋回半径が小さくなるので小回りがきき,前輪と後輪が同じ軌道上を移動することから,軟弱地盤に対してもある程度の走破性を確保できるという利点を有します.しかしその反面,旋回時に横滑りが発生し易く,この横滑りは,自律走行を実現する上で大きな障害になると考えらます. 大きな旋回時に,横滑りがないと仮定した運動学による自律制御の研究例はいくつか報告されていますが,横滑りまで考慮に入れた研究はあまり行われていません.そこで,本研究室では,屈曲型移動車両の旋回時における横滑りに関して,数値シミュレーションを行い,横滑りが発生してからもとの設定軌道に復帰するためのアルゴリズムについて考察することを目的とした研究を行っています. ページの先頭に戻る 研究内容に戻る |
||
オーバーヘッド型ベッセル搭載LHDの機構に関する研究 | ||
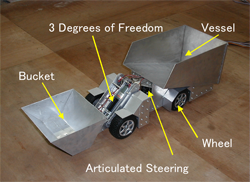
| 現在,地下採鉱現場における運搬作業に広く用いられている機械の1つにLoad Haul Dump(LHD)がありあります.このLHDはバケットによる鉱石等のすくい取り,運搬および荷下ろしを1台で行う優れた機械ですが,LHDは積載部分がバケットのみであるため,運搬容量は十分ではなく,運搬距離が長い作業現場では運搬効率の低下が問題となっています.
本研究室では,従来型LHD(以下,従来機)の機構に替わる新たな機構を導入することにより,運搬容量を増加させた新型LHD(以下,新型機)を提案し,さらに,試作機の設計,製作および性能評価を行うことにより,提案した新型機の有効性を実証することを目的した研究を行っています. ページの先頭に戻る 研究内容に戻る |
|
環境ジオメカトロニクス | ||
 |
||
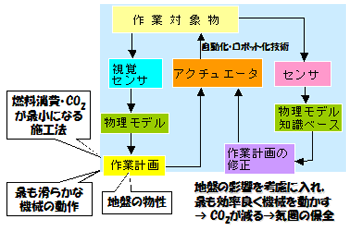
| 建設機械にかかわらず,ほとんどの知能ロボットの構成要素は「環境情報を取り込むセンサ」,「センサによって取り込まれた情報を認識・判断する知識」および「実際に作業を行う部分を制御するアクチュエータ」であり,これらをまとめると図の点線で囲まれた部分に示すようになります.知能建設ロボットには一旦作業を開始したら,別なセンサで作業の進行状況を把握し,例えば硬岩に衝突しているとか,外乱のため目標軌道を追従できていないといった状況が発生したら,知識ベースを基に作業計画を変更するという一連の動作を自律的に行うことが要求されます.以上のような一連の動作を実現するために必要な技術を総合的に検討しようとするのが「ジオメカトロニクス」です. ところで,これからの機械施工では,環境負荷などの影響を無視した施工はありえません.すなわち,環境調和型の機械施工システムが強く求められることになります.そこで,本研究室では「ジオメカトロニクス」に「環境」を考慮に入れた,いわゆる「環境ジオメカトロニクス」を提案し,展開研究を実施したいと考えています.これは,上述の「ジオメカトロニクス」をベースにしますが,機械動作を計画する際に,効率のみならず環境負荷を最小にするような機械動作を計画し,機械の動きを制御することにより,燃料消費を削減し,地球温暖化ガスであるCO2の排出量を削減しようとするものです.図に示すように,「ジオメカトロニクス」では,機械自らが自分を取り巻く環境を認識した後,最も効率良い作業計画を構築することになりますが,「環境ジオメカトロニクス」ではさらに「燃料消費・CO2排出量が最小になるような施工法」,「最も滑らかな機械の動作法」,「地盤の物性」などの影響を考慮し,効率だけでなく環境にも配慮した作業計画を構築し,作業を実行することになります.すなわち,「作業対象である地盤情報をセンシングし,その情報を基に 燃料消費・CO2排出量を最小にし,かつ機械の効率的な自動制御を目指す」のが「環境ジオメカトロニクス」の概念です. ページの先頭に戻る 研究内容に戻る |
||
廃棄物の地産地消 | ||
 |
||
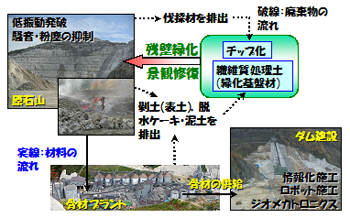
| 環境と調和した機械施工を行うためには,現場で排出された廃棄物を外に持ち出さず,現場で処理し,現場で再利用できることが最も望ましい.これは,いわゆる廃棄物の「地産地消」と言えます.例えば,図に示すようにダム建設工事では,大量の土砂,岩石・骨材などを必要とします.そこで,近くの原石山から岩石・砕石を得ようとすると,木を伐採し,表土を剥ぎ取らなければならず,伐採材や掘削土砂が排出されます.環境調和型機械施工を実現するためには,これらの廃棄物を有効利用し,環境修復などを行う工夫が必要不可欠です.原石山から採取した岩石は破砕プラント・骨材プラントに送られ,骨材が生成され,ダム工事現場に供給されますが,この時,脱水ケーキや高含水比泥土を排出します.本研究室で開発を進めている繊維質処理土は,軽量であり,高い保水性・保肥性を有
し,かつ乾湿繰り返しに対する劣化耐久性に優れていることから,本研究室では土質系廃棄物は繊維質処理土に再資源化し,また伐採材はチップ化して,両者を混合して強い降雨にも対抗でき岩盤斜面に馴染む生育基盤材を生成し,原石山の残壁を緑化するといった循環システムの実現に向けて研究を進めています.このような循環システムが確立できれば,いわゆる廃棄物の「地産地消」が可能になり,景観修復にも繋がると期待しています. ページの先頭に戻る 研究内容に戻る |
||