
研究概要 |
| 2003年の汚染土壌対策法の施行に伴い,現在稼動中の建造物直下の土壌調査のニーズが増加しております.本研究室では,低コストで効率的な地盤調査を実現するために,小口径小型掘進機械(モグラロボット)の開発とマイクロドリリングに関する研究を実施しています.
●小口径無排土掘進機械の開発 ●遠隔操作型掘進機械の開発 ●自走式小口径掘進機械の開発 |
小口径無排土掘進機械の開発 | ||
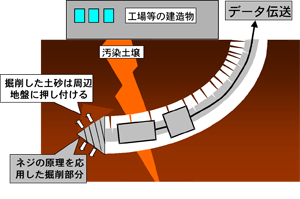
| 稼動中の工場等の建造物直下の土壌を調査する場合,一般的に水平ボーリング用機械などの大規模な掘削機械を現場に搬入し,建造物直下の土壌を掘削する工法が採用されます.しかし,工場でも溶剤タンクからの漏れなど汚染の範囲をある程度限定できる場合が多々あり,そのような場合,大規模の機械を搬入して水平ボーリングを行うのでは,あまりにも非効率的かつ非経済的と考えられます.そこで,本研究室では,汚染の可能性のある建造物直下の土壌までピンポイントで掘削する小型の無排土掘進機械を開発し,建造物直下の土壌調査を大幅に効率化することを目的とた研究を実施しています.これまでに2,3の掘進機械の設計・製作を行ってきましたが,機械的な手法では掘削土砂の円滑な排出は困難であることから,掘進部分にネジの原理を応用した小型掘進機械の開発を行っています.実験では,掘進部分をネジ式にすることにより無排土掘削が可能であることを確認し,掘進時のトルクの計測などを行っています. |

 |
|
 |
||
遠隔操作型掘進機械の開発 | ||||

掘進機械模型 |

|

|
||
| 上記の「小口径無排土掘進機械の開発」と同様に,汚染の可能性のある建造物直下の土壌までピンポイントで掘削する小型の無排土掘進機械を開発し,建造物直下の土壌調査を大幅に効率化することを目的とた研究の一環であり,ここでは掘削土砂の排出にスクリューコンベア式を採用しています.汚染部分までピンポイント掘削を実現するためには,曲線掘削も必要になることから,一定の長さのスクリューを上図のような関節で結合し,曲線掘削を可能にしています.本研究では,掘進速度に及ぼすスクリューピッチおよび掘削刃の形状の影響などについて検討しています.
なお,本研究は,月資源利用(ISRU:In-Situ Resources Utilization)のための月面掘削技術の開発にも利用可能であることから,JAXAや他大学と共同研究を開始すべく準備を行っています. ページの先頭に戻る 研究内容に戻る | ||||
自走式小口径掘進機械の開発 | ||
| ある程度広範囲の土壌を調査するためには,機械自体が自走し,地盤内を自在に掘進する機構が必要であると思われます.そこで,建造物直下の地盤内を自走し,自在掘進する機械の開発にも取り組んでいます.右図の機械では,1ピッチ分のオーガーを掘進部分に設け,オーガーで掘削した土砂をベルコンに導き,機械内部を通って,後方に排出機構になっています.移動は履帯により,また進行方向の反力も履帯部分で取るようになっています.ただ,オーガーでの掘進時には回転モーメントも作用しますが,これに対抗できるだけの反力は取りきれていないのが現状です.またオーガーとベルコンとの連絡がまだうまく行っておらず,掘削土砂がスムーズにベルコンに流れないなど,今後,工夫すべき点も多々あり,研究を継続して行きたいと考えています. ページの先頭に戻る 研究内容に戻る |
 |
|